Update: This project is more heavily documented on GitHub
One of the biggest ongoing projects that I’ve been working on is a system for FPV drone racing lap timing. There are two main methods that can be used to track the position of racing drones. This first uses small infrared emitters on every drone and receivers at racing gates to track when each drone passes through the gates. My first attempt at a race system utilized this method. Pictured below are the small emitters that each output a unique ID over a 56kHz modulated protocol.
![]()
These are controlled by an AtTiny85 running simple code. The emitters worked flawlessly and very fairly cheap to produce (< $1.50). However, I ran into a lot of issues with the receivers. I was unable to reliably catch every single ID signal coming from the emitters as they passed extremely fast through the receiving window of the sensor. This method also had the downside that every single drone would need to have an emitter wired in.
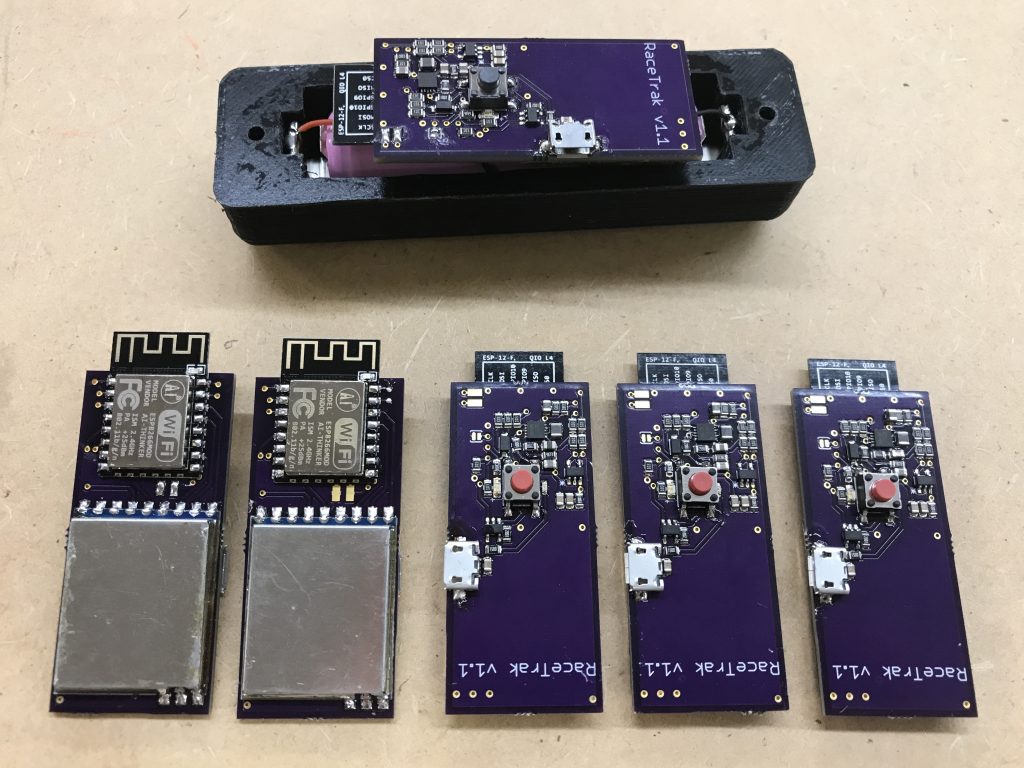
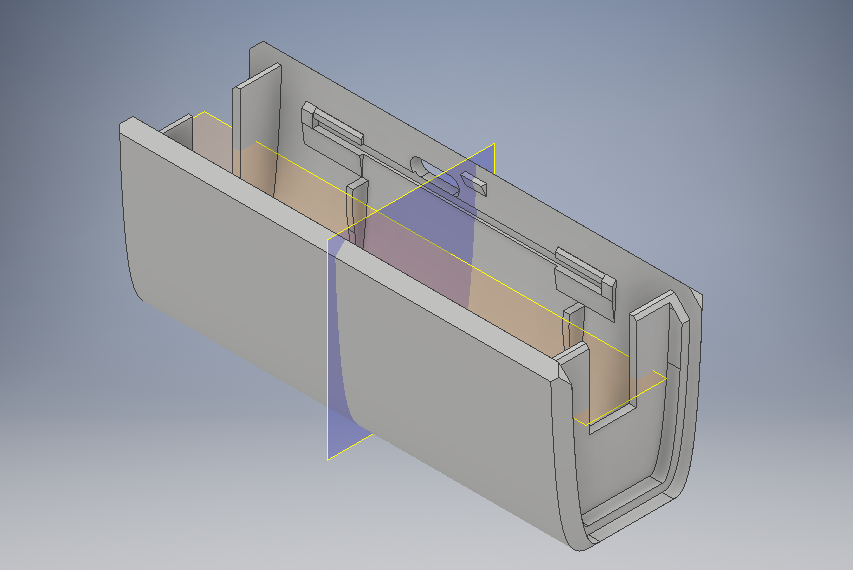
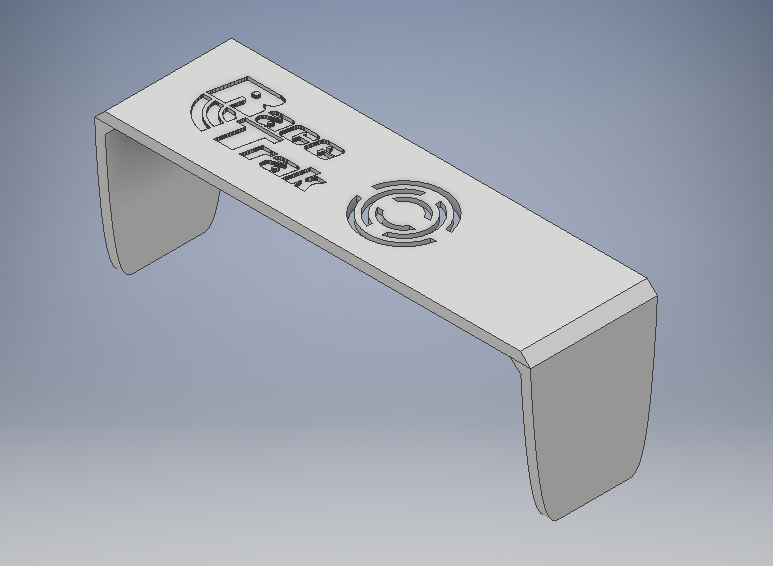
Moving away from this method of tracking, I decided to instead use the 5.8gHz video signal to locate each drone in the air. This was fairly easy to do using the RSSI data from existing video RX modules. I also decided to change the focus of this project from a tracking system to more of a personal tracking device. More details of the development can be found here: https://github.com/JSut210/RaceTrak Below are some additional images of the PCB and 3D printed case.