As I build my next 250 quad with the intent of racing down at my local club, I’m looking to fix the problem of the camera pointing at the ground when traveling at a high angle of attack. I designed this gimbal to work with the Fatshark 600tvl FPV camera and a standard 9g servo. Here are some pictures:
<div class="separator" style="clear: both; text-align: center;"></div>
<div class="separator" style="clear: both; text-align: center;"> </div><div class="separator" style="clear: both; text-align: center;">
</div><div class="separator" style="clear: both; text-align: center;">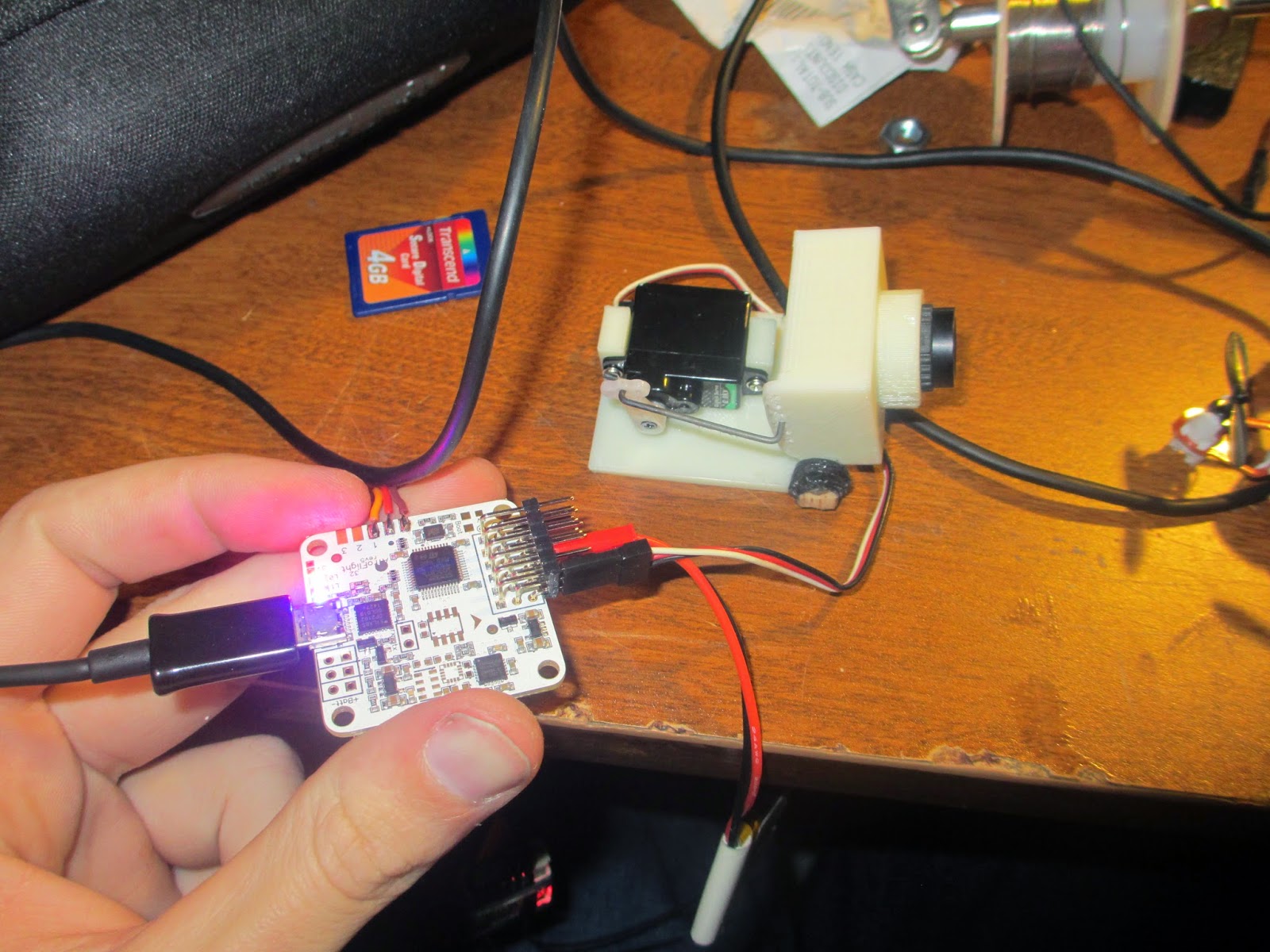 </div><div class="separator" style="clear: both; text-align: center;">
</div><div class="separator" style="clear: both; text-align: center;">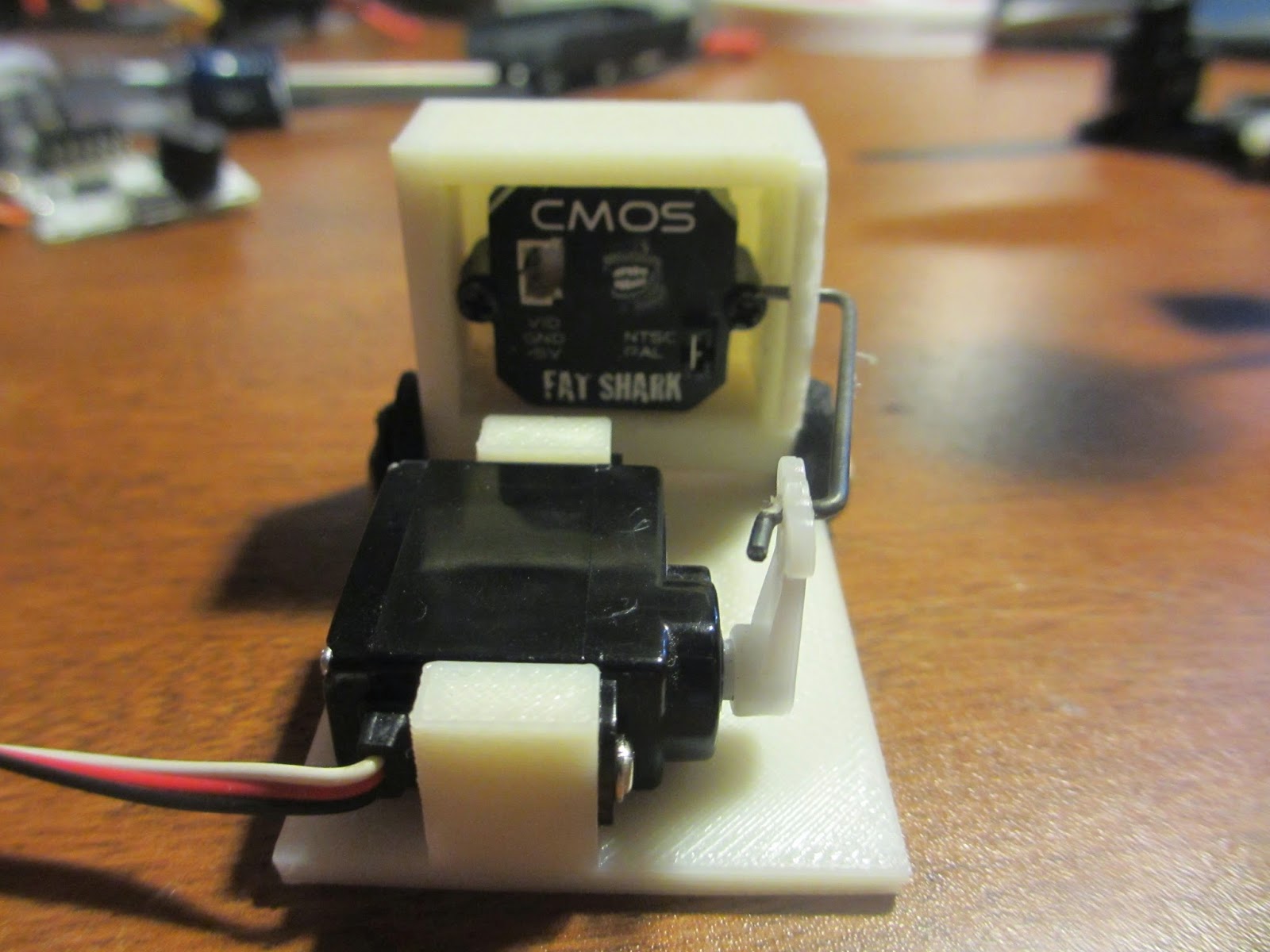 </div>As you can see, I use the servo capabilities on the Naze32. This functionality is switched on and off by a switch on my TX. Once again the workbench is a mess.
</div>As you can see, I use the servo capabilities on the Naze32. This functionality is switched on and off by a switch on my TX. Once again the workbench is a mess.
<div class="separator" style="clear: both; text-align: center;"> </div>
</div>